Libraries Demo¶
autodiff.forward¶
Univariate Functions¶
The standard workflow for autodiff is to first initiate a
Variable, or several Variables. We then use these Variable
to construct Expressions, which can then be queried for values and
derivatives.
In [65]:
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
from autodiff.forward import *
Suppose we want to calculate the derivatives of
\(f(x) = \cos(\pi x)\exp(-x^2)\). We can start with creating a
Variable called x.
In [66]:
x = Variable()
We then create the Expression for \(f(x)\). Note that here
cos and exp are library functions from autrodiff.
In [67]:
f = cos(np.pi*x)*exp(-x**2)
We can then evaluate \(f(x)\)‘s value and derivative by calling the
evaluation_at method and the derivative_at method. For
derivative_at method, the first argument specifies which variable to
take derivative with respect to, the second argument specifies which
point in the domain are the derivative to be calculated.
In [68]:
f.evaluation_at({x: 1})
Out[68]:
-0.36787944117144233
In [69]:
f.derivative_at(x, {x: 1})
Out[69]:
0.73575888234288456
The derivative_at method supports second order derivative. If we
want to calculate \(\dfrac{d^2 f}{d x^2}\), we can add another
argument order=2.
In [70]:
f.derivative_at(x, {x: 1}, order=2)
Out[70]:
2.8950656693130772
Both the methods evaluation_at and derivative_at are vectorized,
and instead of pass in a scalar value, we can pass in a numpy.array,
and the output will be f’s value / derivative at all entried of the
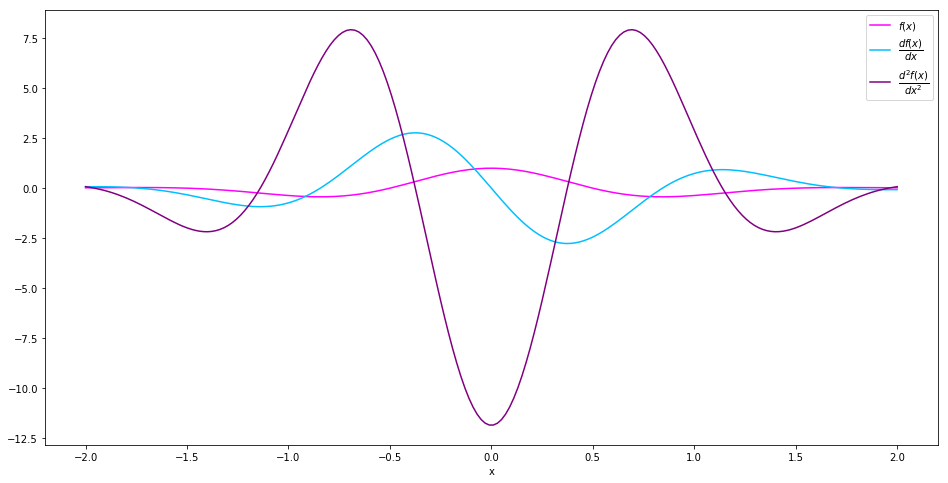
input. For example, we can calculate the value, first order derivative
and second order derivative of \(f(x)\) on the interval
\([-2, 2]\) simply by
In [71]:
interval = np.linspace(-2, 2, 200)
values = f.evaluation_at( {x: interval})
der1st = f.derivative_at(x, {x: interval})
der2nd = f.derivative_at(x, {x: interval}, order=2)
In [72]:
fig = plt.figure(figsize=(16, 8))
plt.plot(interval, values, c='magenta', label='$f(x)$')
plt.plot(interval, der1st, c='deepskyblue', label='$\dfrac{df(x)}{dx}$')
plt.plot(interval, der2nd, c='purple', label='$\dfrac{d^2f(x)}{dx^2}$')
plt.xlabel('x')
plt.legend()
plt.show()
Multivariate Functions¶
The workflow with multivariate functions are essentially the same.
Suppose we want to calculate the derivatives of
\(g(x, y) = \cos(\pi x)\cos(\pi y)\exp(-x^2-y^2)\). We can start
with adding another Variable called y.
In [73]:
y = Variable()
We then create the Expression for \(g(x, y)\).
In [74]:
g = cos(np.pi*x) * cos(np.pi*y) * exp(-x**2-y**2)
We can then evaluate \(f(x)\)‘s value and derivative by calling the
evaluation_at method and the derivative_at method, as usual.
In [75]:
g.evaluation_at({x: 1.0, y: 1.0})
Out[75]:
0.1353352832366127
In [76]:
g.derivative_at(x, {x: 1.0, y: 1.0})
Out[76]:
-0.27067056647322535
In [77]:
g.derivative_at(x, {x: 1.0, y: 1.0})
Out[77]:
-0.27067056647322535
Now we have two variables, we may want to calculate
\(\dfrac{\partial^2 g}{\partial x \partial y}\). We can just replace
the first argument of derivative_at to a tuple (x, y). In this
case the third argument order=2 can be omitted, because the
Expression can infer from the first argument that we are looking for
a second order derivative.
In [78]:
g.derivative_at((x, y), {x: 1.0, y: 1.0})
Out[78]:
0.54134113294645059
We can also ask g for its Hessian matrix. A numpy.array will be
returned.
In [79]:
g.hessian_at({x: 1.0, y:1.0})
Out[79]:
array([[-1.06503514, 0.54134113],
[ 0.54134113, -1.06503514]])
Since the evaluation_at method and derivarive_at method are
vectorized, we can as well pass in a mesh grid, and the output will be a
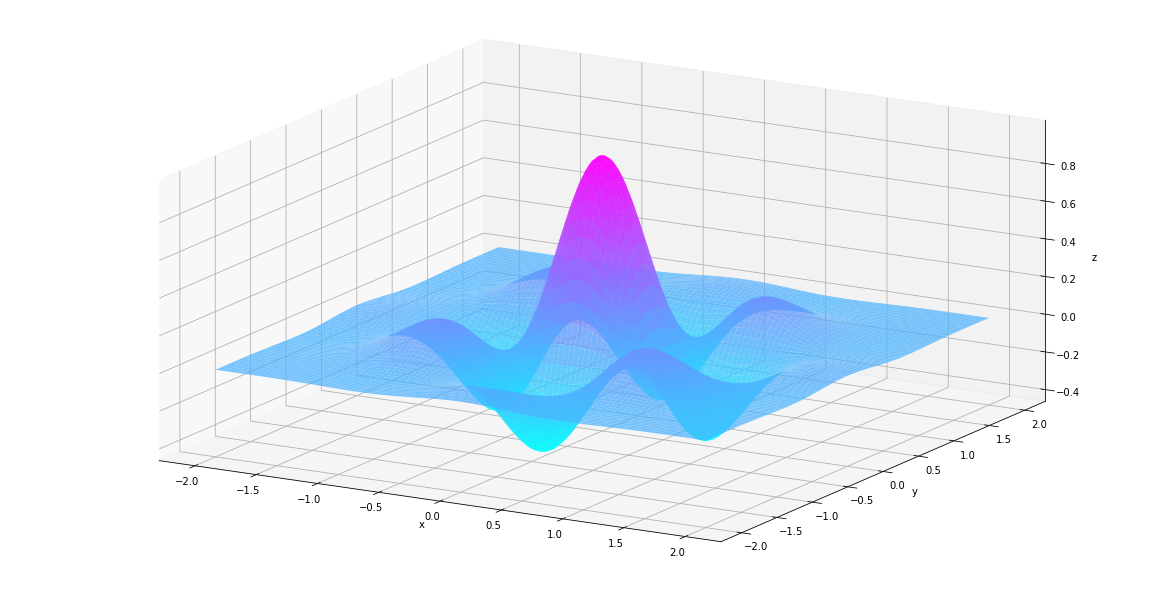
grid of the same shape. For example, we can calculate the value, first
order derivative and second order derivative of f(x)f(x) on the interval
\(x\in[−2,2], y\in[-2,2]\) simply by
In [80]:
us, vs = np.linspace(-2, 2, 200), np.linspace(-2, 2, 200)
uu, vv = np.meshgrid(us, vs)
In [81]:
values = g.evaluation_at( {x: uu, y:vv})
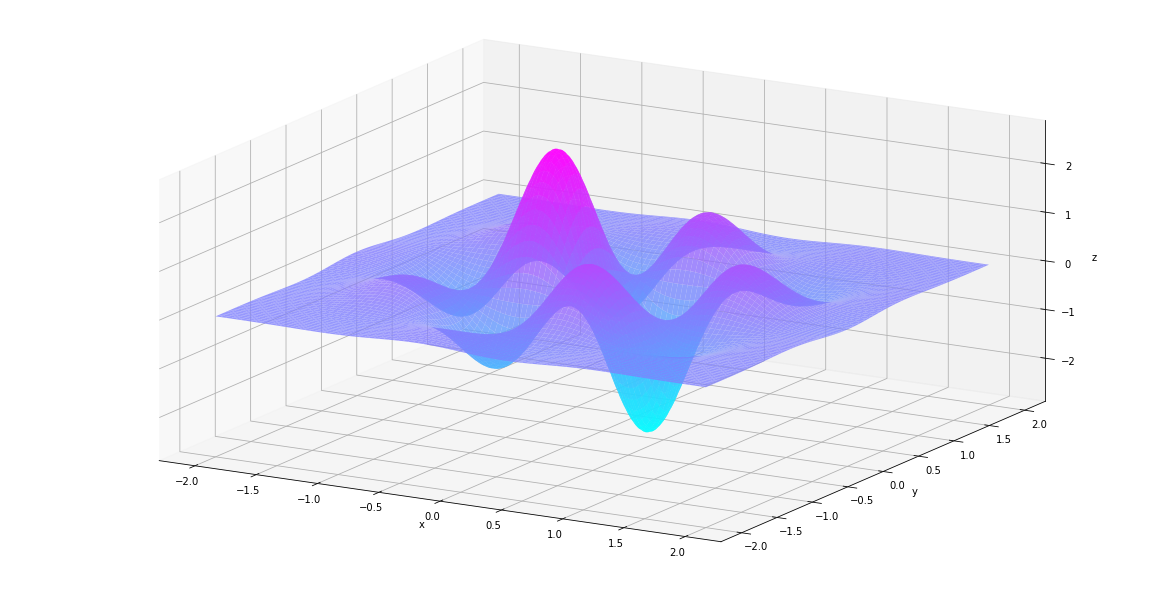
der1st = g.derivative_at(x, {x: uu, y:vv})
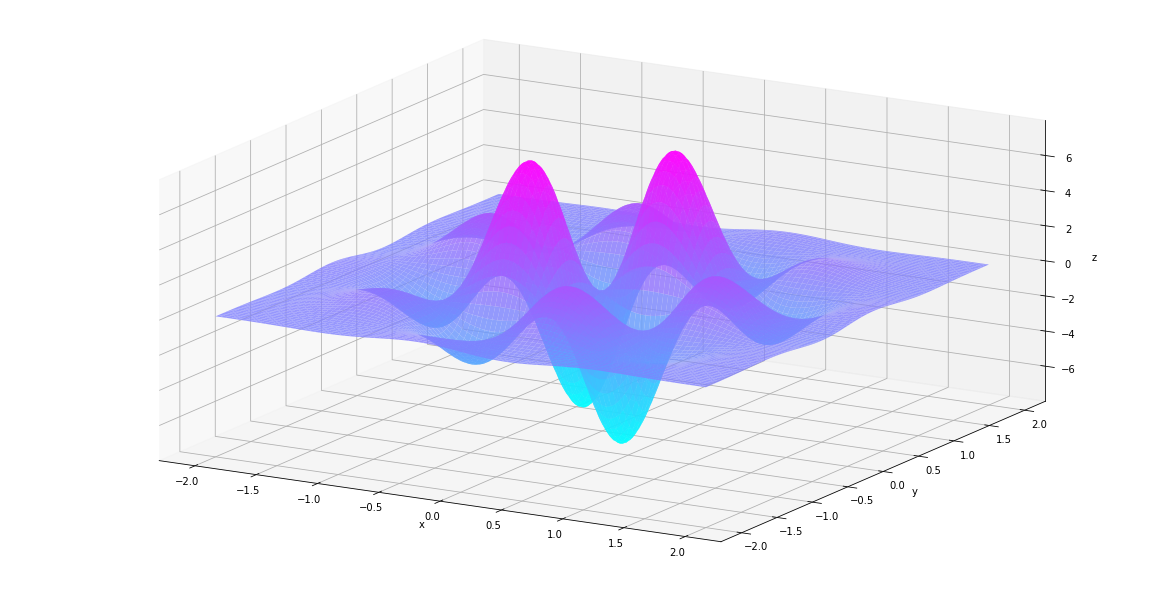
der2nd = g.derivative_at((x, y), {x: uu, y:vv})
Let’s see what they look like.
In [82]:
def plt_surf(uu, vv, zz):
fig = plt.figure(figsize=(16, 8))
ax = Axes3D(fig)
surf = ax.plot_surface(uu, vv, zz, rstride=2, cstride=2, alpha=0.8, cmap='cool')
ax.set_xlabel('x')
ax.set_ylabel('y')
ax.set_zlabel('z')
ax.set_proj_type('ortho')
plt.show()
In [83]:
plt_surf(uu, vv, values)
In [84]:
plt_surf(uu, vv, der1st)
In [85]:
plt_surf(uu, vv, der2nd)
Vector Functions¶
Functions defined on \(\mathbb{R}^n \mapsto \mathbb{R}^m\) are also
supported. Here we create an VectorFunction that represents
\(h(\begin{bmatrix}x\\y\end{bmatrix}) = \begin{bmatrix}f(x)\\g(x, y)\end{bmatrix}\).
In [86]:
h = VectorFunction(exprlist=[f, g])
We can then evaluates \(h(\begin{bmatrix}x\\y\end{bmatrix})\)‘s
value and gradient
(\(\begin{bmatrix}\dfrac{\partial f}{\partial x}\\\dfrac{\partial g}{\partial x}\end{bmatrix}\)
and
\(\begin{bmatrix}\dfrac{\partial f}{\partial y}\\\dfrac{\partial g}{\partial y}\end{bmatrix}\))
by calling its evaluation_at method and gradient_at method. The
jacobian_at function returns the Jacobian matrix
(\(\begin{bmatrix}\dfrac{\partial f}{\partial x} & \dfrac{\partial f}{\partial y} \\ \dfrac{\partial g}{\partial x} & \dfrac{\partial g}{\partial y} \end{bmatrix}\)).
In [87]:
h.evaluation_at({x: 1.0, y: -1.0})
Out[87]:
array([-0.36787944, 0.13533528])
In [88]:
h.gradient_at(0, {x: 1.0, y: -1.0})
Out[88]:
array([ 0., 0.])
In [89]:
h.jacobian_at({x: 1.0, y: -1.0})
Out[89]:
array([[ 0.73575888, 0. ],
[-0.27067057, 0.27067057]])
autodiff.rootfinding¶
Rootfinding module provides function newton_scalar to find the root
of a given function with arbitrarily many variables. It also works with
back propagation mode. Here for visualization purpose we only show up to
2 variables.
Example1: try to approximate: \(f=sin(x)-0.4x = 0\) from \(x = -2.5,y = -1.5\)
In [90]:
import matplotlib.pyplot as plt
import numpy as np
%matplotlib inline
from autodiff.forward import *
from autodiff.rootfinding import *
from mpl_toolkits.mplot3d import Axes3D
import matplotlib.pyplot as plt
In [91]:
x = Variable()
f = x**2-4*x
result_d = newton_scalar(f,{x:1},max_itr=100)
In [92]:
xx= np.linspace(-np.pi,np.pi,100)
plt.plot(xx,xx**2,color = 'black')
plt.plot(xx,4*xx,color = 'blue')
plt.scatter([result_d[x]],[f.evaluation_at({x:result_d[x]})],color = 'red')
Out[92]:
<matplotlib.collections.PathCollection at 0x107e954e0>
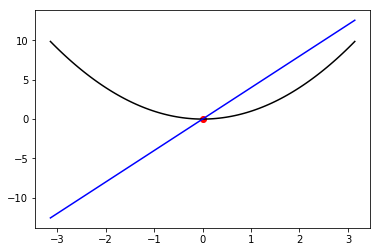
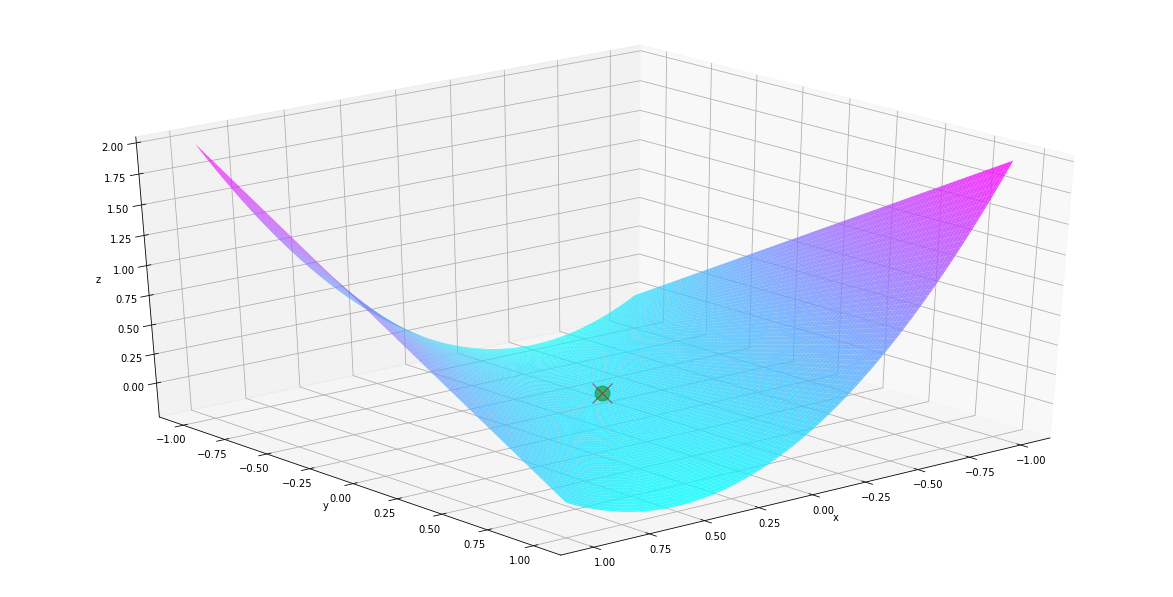
Example 2: \(f(x,y) = x^2-xy = 0\) from \(x=1\), and \(y=10\)
In [93]:
x, y = Variable(), Variable()
f = x**2-x*y
result_d = newton_scalar(f,{x:1,y:10},max_itr = 100)
In [94]:
fig = plt.figure(figsize=(16, 8))
ax = Axes3D(fig)
us, vs = np.linspace(-1, 1, 200), np.linspace(-1, 1, 200)
uu, vv = np.meshgrid(us, vs)
zz = f.evaluation_at({x: uu, y:vv})
ax.plot([0], [0], [0], marker='o', markersize=15, c='green',alpha = .5)
surf = ax.plot_surface(uu, vv, zz, rstride=2, cstride=2, alpha=0.8, cmap='cool')
ax.plot([result_d[x]], [result_d[y]],
[f.evaluation_at({x:result_d[x],y:result_d[y]})],
marker='x', markersize=20, c='red',alpha = .8)
ax.set_xlabel('x')
ax.set_ylabel('y')
ax.set_zlabel('z')
ax.view_init(30, 50)
plt.show()
autodiff.optimize¶
In [95]:
import numpy as np
from autodiff.forward import *
import autodiff.optimize as opt
from mpl_toolkits.mplot3d import Axes3D
import matplotlib.pyplot as plt
%matplotlib inline
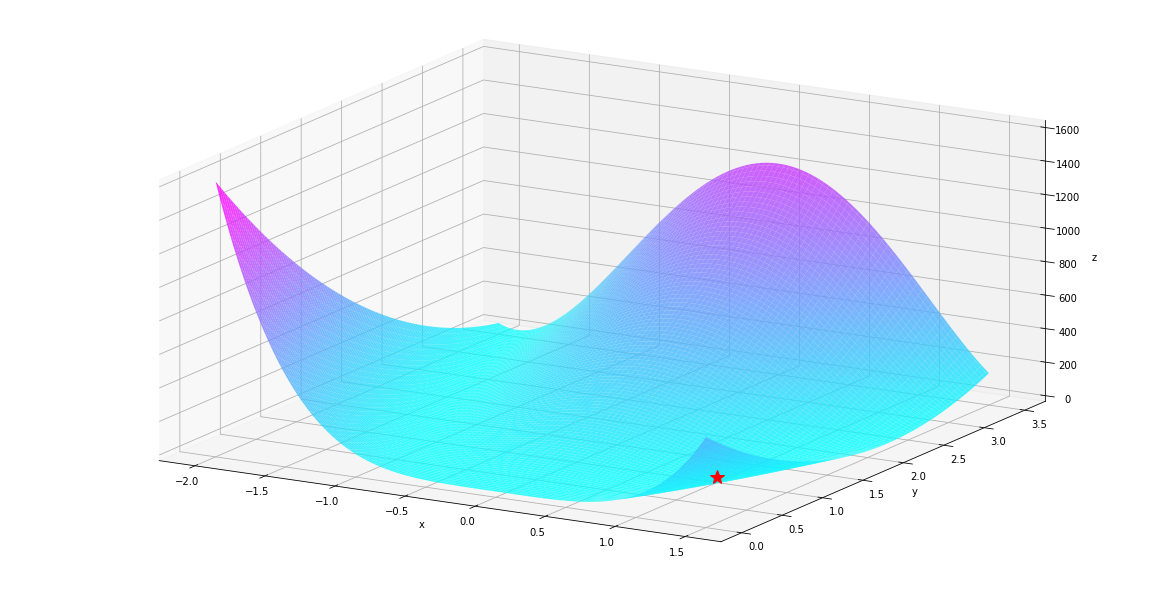
We included several basic optimization routines built on
autodiff.forward. Here we’ll use the Rosenbrock function to
demonstrate the use of these optimization routines. The Rosenbrock
function is defined as \(f(x, y) = (a-x)^2 + b(y-x^2)^2\). Here we
use \(a=1, b=100\).
In [96]:
x, y = Variable(), Variable()
f = (1-x)**2 + 100*(y-x**2)**2
In [97]:
us, vs = np.linspace(-2, 1.5, 200), np.linspace(0.0, 3.5, 200)
uu, vv = np.meshgrid(us, vs)
values = f.evaluation_at({x: uu, y:vv})
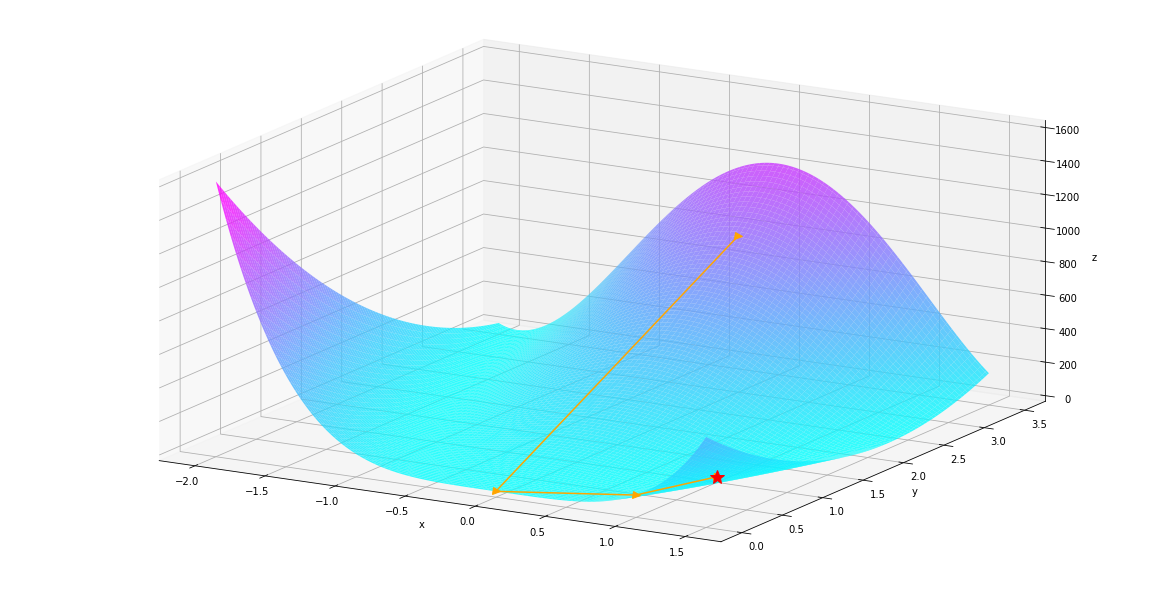
The landscape of the function looks like below. The global minimum is at \([-1, 1]\), it is marked by the red star.
In [98]:
def plt_surf(uu, vv, zz, traj=None, show_dest=False, show_traj=False):
fig = plt.figure(figsize=(16, 8))
ax = Axes3D(fig)
if show_traj: ax.plot(traj[0], traj[1], traj[2], marker='>', markersize=7, c='orange')
if show_dest: ax.plot([1.0], [1.0], [0.0], marker='*', markersize=15, c='red')
surf = ax.plot_surface(uu, vv, zz, rstride=2, cstride=2, alpha=0.8, cmap='cool')
ax.set_xlabel('x')
ax.set_ylabel('y')
ax.set_zlabel('z')
ax.set_proj_type('ortho')
plt.show()
In [99]:
plt_surf(uu, vv, values, show_dest=True)
autodiff.optimize.gradient_descent¶
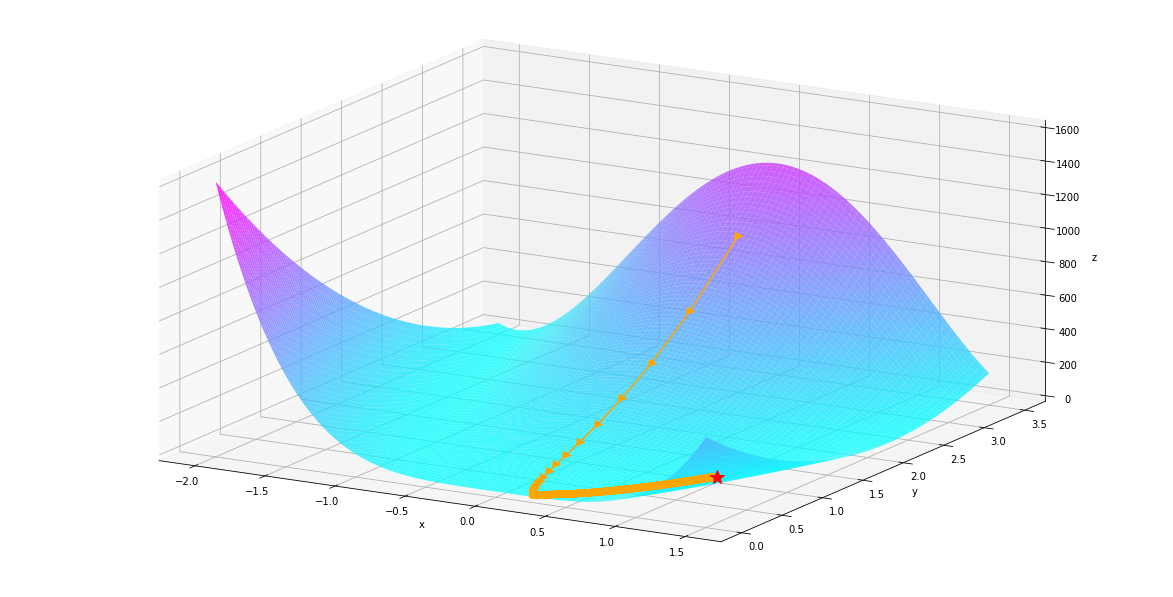
Let’s say we start from \((0.0, 3.0)\). We’ll first use gradient
descent to find the miminum. The gradient descent is implemented in
autodiff.optimize.gradient_descent. Here we set the argument
return_history=True to return a whole history of optimization.
In [100]:
hist = opt.gradient_descent(f, init_val_dict={x: 0.0, y: 3.0}, max_iter=10000,
return_history=True)
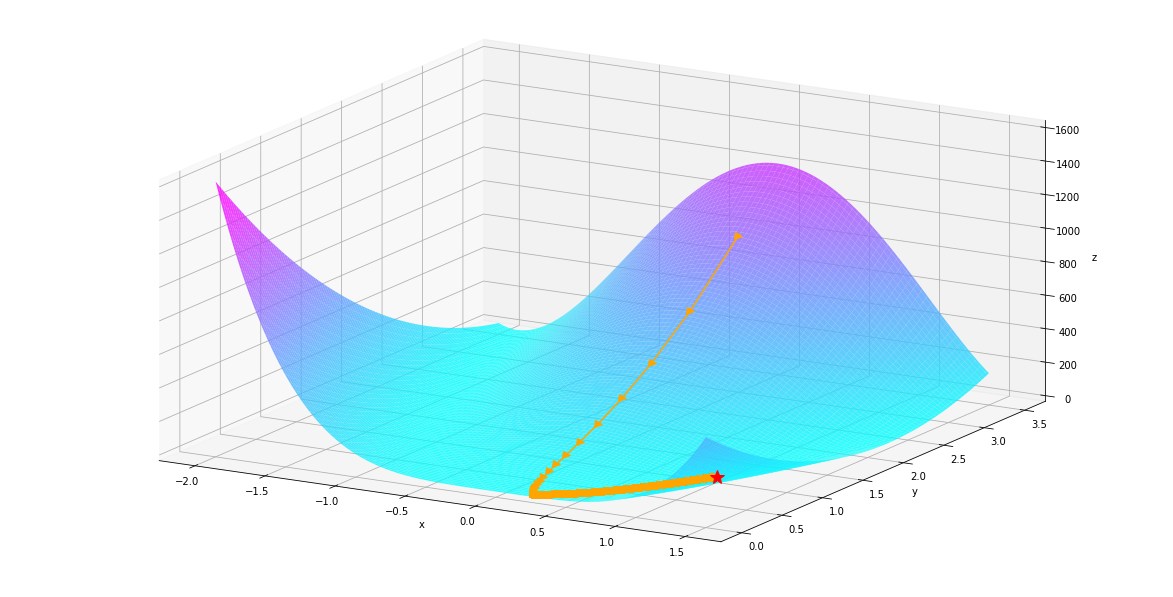
We can plot our optimization path as below. We can see that gradient descent approaches the minimum slowly because the gradient around the minimum is small.
In [101]:
hist = np.array(hist)
us, vs = hist[:, 0].flatten(), hist[:, 1].flatten()
zs = f.evaluation_at({x: us, y: vs})
plt_surf(uu, vv, values, (us, vs, zs), show_dest=True, show_traj=True)
autodiff.optimize.newton¶
We’ll then use Newton’s method to find the miminum. The Newton’s method
is implemented in autodiff.optimize.newton. Here we set the argument
return_history=True to return a whole history of optimization.
In [102]:
hist = opt.newton(f, init_val_dict={x: 0.0, y: 3.0}, max_iter=10000,
return_history=True)
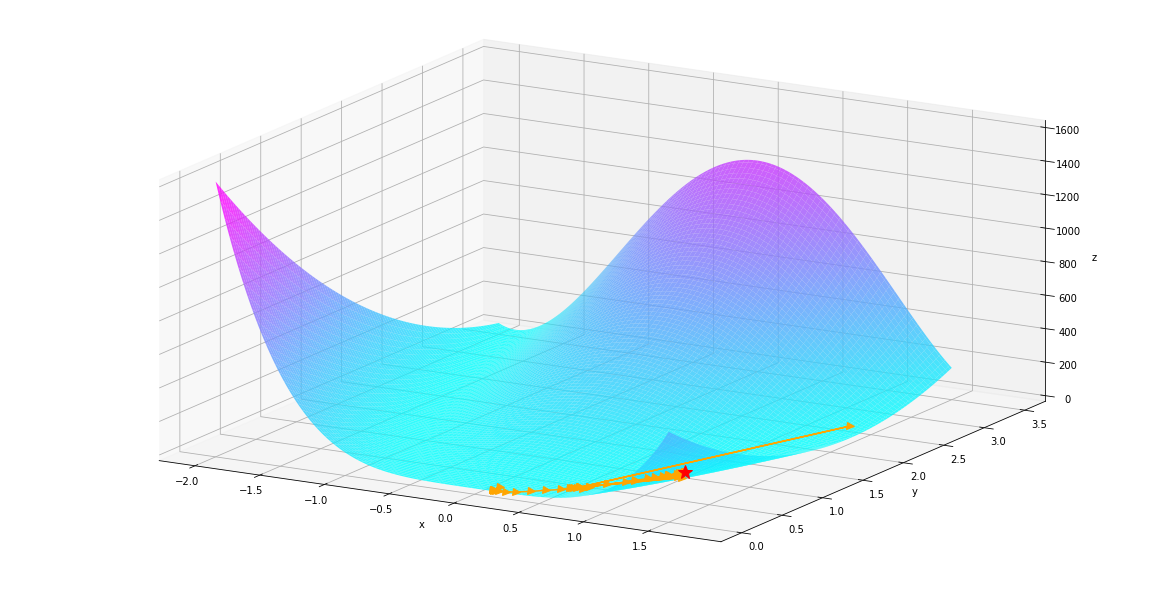
We can plot our optimization path as below. The Newton’s method makes use of second-derivative information. We can see that the Newton’s method takes much fewer steps to reach the minimum.
In [103]:
hist = np.array(hist)
us, vs = hist[:, 0].flatten(), hist[:, 1].flatten()
zs = f.evaluation_at({x: us, y: vs})
plt_surf(uu, vv, values, (us, vs, zs), show_dest=True, show_traj=True)
autodiff.optimize.gradient_descent¶
Now let’s look at the gradient_descent method, unlike Newton’s method, one does not need the Hessian matrix to find the minimum, while the trade off is that the algorithm might stuck in local minimum and takes more iteration.
In [104]:
hist = opt.gradient_descent(f, init_val_dict={x: 0.0, y: 3.0}, max_iter=10000,
return_history=True)
We see gradient descent took a lot more steps then newton’s method.
In [105]:
hist = np.array(hist)
us, vs = hist[:, 0].flatten(), hist[:, 1].flatten()
zs = f.evaluation_at({x: us, y: vs})
plt_surf(uu, vv, values, (us, vs, zs), show_dest=True, show_traj=True)
autodiff.optimize.bfgs¶
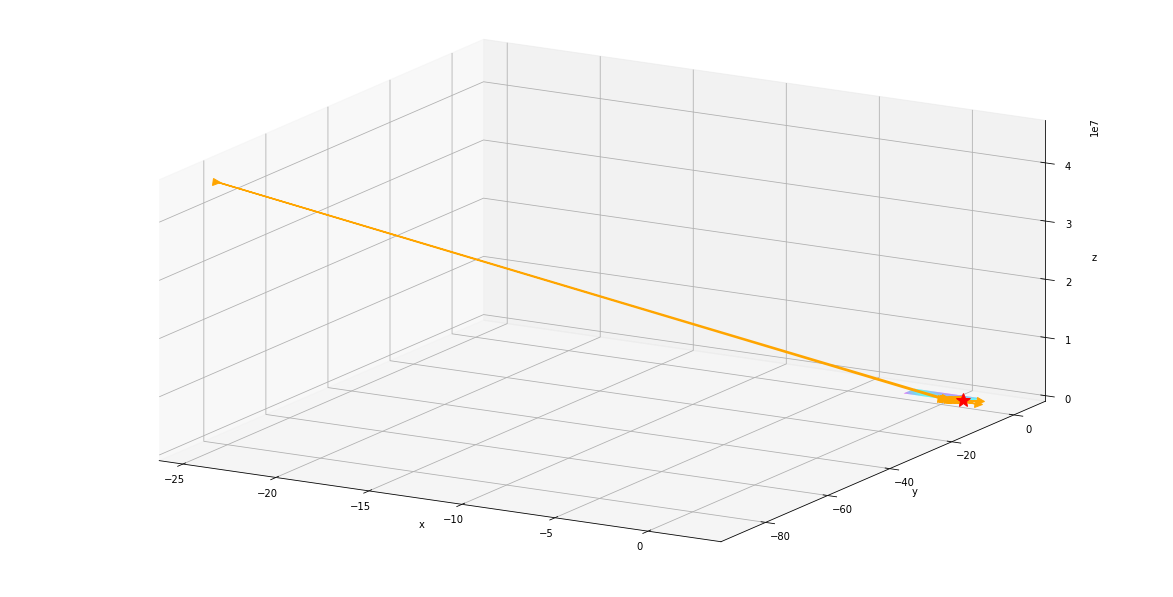
Lastly, we’ll use BFGS to find the miminum. BFGS is a quasi-Newton method that approximates the Hessian matrix while doing the optimization. The optimization path of BFGS can be quite hysterical, so we’ll just show the optimization result. It is \([1.0, 1.0]\) as we expected.
In [106]:
res = opt.bfgs(f, init_val_dict={x: 0.0, y: 3.0})
In [107]:
print(res[x], res[y])
1.00000000001 1.00000000001
Let’s look at the plot for bfgs, we see it blows up before it get to the mininum
In [108]:
hist = opt.bfgs(f, init_val_dict={x: 0.0, y: 0.0}, max_iter=10000,
return_history=True)
hist = np.array(hist)
us, vs = hist[:, 0].flatten(), hist[:, 1].flatten()
zs = f.evaluation_at({x: us, y: vs})
plt_surf(uu, vv, values, (us, vs, zs), show_dest=True, show_traj=True)
Let take a closer look by excluding the very large value in the first few iterations
In [109]:
hist_trim = hist[5:,:]
In [110]:
us, vs = hist_trim[:, 0].flatten(), hist_trim[:, 1].flatten()
zs = f.evaluation_at({x: us, y: vs})
plt_surf(uu, vv, values, (us, vs, zs), show_dest=True, show_traj=True)
autodiff.plot¶
Plot function takes in a single expression, which only has two subcomponent. It then use either Newton’s Method or Gradient Descent to calculate the minimum of the given function. It plots the values of the function at different points in a contour map, with ranges specified by the user,and highlights the trajectory of the optimization algorithm reaching the minimum.
In [111]:
import autodiff.forward as fwd
import autodiff.optimize as opt
from autodiff.plot import plot_contour
In [112]:
x, y = fwd.Variable(), fwd.Variable()
f = 100.0*(y - x**2)**2 + (1 - x)**2.0
init_val_dict = {x: 0.0, y: 1.0}
plot_contour(f,init_val_dict,x,y,plot_range=[-0.5,0.8],method = "gradient_descent")
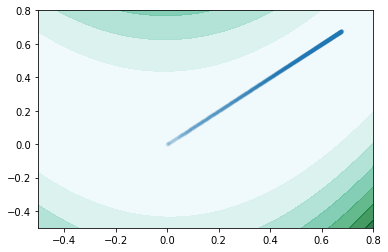
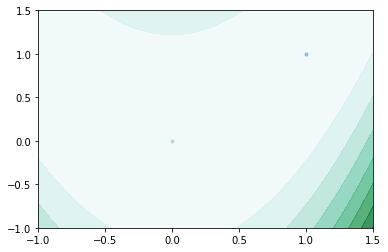
We see that newton method merely used 2 iteration
In [113]:
plot_contour(f,init_val_dict,x,y,plot_range=[-1,1.5],method = "newton")
autodiff.backprop¶
In [134]:
import numpy as np
import matplotlib.pyplot as plt
%matplotlib inline
from autodiff.backprop import *
from autodiff.forward import *
from autodiff.rootfinding import *
import time
Backpropagation module is built upon the interfaces developed in central code file “Autodiff.forward”. It calculate the derivative of each nodes in the compuational graph with respect to the root nodes. Therefore with different root nodes, we should expect to see different values of derivative. suppose we have the following structure:
\(x = 1\), \(y = 2\)
\(c = \sin(x)\)
\(d = c \cdot y\)
Note: after one round of back propagation, the .bder attributes stores the answer from the last round until it is cleared when a new round is called upon.
In [135]:
x = Variable()
y = Variable()
c = sin(x)
d = c*y
back_propagation(c,{x:1,y:2})
print('derivative of x with respect to c is ', x.bder)
print('derivative of y with respect to c is ', y.bder)
back_propagation(d,{x:1,y:2})
print('derivative of x with respect to c is ', x.bder)
print('derivative of y with respect to c is ', y.bder)
derivative of x with respect to c is 0.540302305868
derivative of y with respect to c is 0
derivative of x with respect to c is 1.08060461174
derivative of y with respect to c is 0.841470984808
If we calculate by hand:
$
$
Our Backward Mode is faster than Forward Mode when getting the derivatives of all nodes in a certain computational graph because of caching the results in the process.
User can use our backward mode to make their own neural network
In [136]:
start1 = time.time()
x = Variable()
y = Variable()
c = sin(x)
d = cos(y)
e = sin(x)*cos(y)
f = tan(e)
for i in range(10000):
back_propagation(f,{x:1,y:2})
end1 = time.time()
interval = end1-start1
print('derivative of x with respect to f is ', x.bder)
print('derivative of y with respect to f is ', y.bder)
print('derivative of c with respect to f is ', c.bder)
print('derivative of d with respect to f is ', d.bder)
print('derivative of e with respect to f is ', e.bder)
print('derivative of f with respect to f is ', f.bder)
print('derivative of g with respect to f is ', g.bder)
print('time taken is {} second'.format(interval))
derivative of x with respect to f is -0.254837416116
derivative of y with respect to f is -0.867211207612
derivative of c with respect to f is 0
derivative of d with respect to f is 0
derivative of e with respect to f is 1.1333910384
derivative of f with respect to f is 1
derivative of g with respect to f is 0
time taken is 0.43090200424194336 second
In [137]:
start2 = time.time()
for i in range(10000):
forward_x = f.derivative_at(x,{x:1,y:2})
forward_y = f.derivative_at(y,{x:1,y:2})
forward_c = f.derivative_at(c,{x:1,y:2})
forward_d = f.derivative_at(d,{x:1,y:2})
forward_e = f.derivative_at(e,{x:1,y:2})
forward_f = f.derivative_at(f,{x:1,y:2})
forward_g = f.derivative_at(g,{x:1,y:2})
end2 = time.time()
interval = end2-start2
print('derivative of x with respect to f is ', forward_x)
print('derivative of y with respect to f is ', forward_y)
print('derivative of c with respect to f is ', forward_c)
print('derivative of d with respect to f is ', forward_d)
print('derivative of e with respect to f is ', forward_e)
print('derivative of f with respect to f is ', forward_f)
print('derivative of g with respect to f is ', forward_g)
print(interval)
derivative of x with respect to f is -0.254837416116
derivative of y with respect to f is -0.867211207612
derivative of c with respect to f is -0.0
derivative of d with respect to f is -0.0
derivative of e with respect to f is 1.1333910384
derivative of f with respect to f is 1.0
derivative of g with respect to f is -0.0
0.8440079689025879
Back propagation is also integrated with the function Newton’s
Note that sine function have multiple roots, and newton’s method will only give you the first one it finds
In [142]:
result_d=newton_scalar(d,{x:1,y:-1},max_itr = 25,method = 'backward')
In [143]:
print('x:',result_d[x])
print('y:',result_d[y])
print('function value:',abs(d.evaluation_at({x:result_d[x],y:result_d[y]})))
x: 2.84112466652
y: -1.5707963268
function value: 5.91243550575e-13